TL;DR
You can call this the sequel to decisions
Introduction
Having asked so many questions drawn out in our project plan and discussed over the course of 4 weeks, it was time to answer some of them as recorded in this blog.
Choices
Collector
First and foremost, we needed to decide on how would we like our collection system to be designed. We came up with two main designs. The first includes a circular one similar to what we had previously while the second was more of a grid like design. This decision is crucial to determine the positions of various other components. We eventually settled for the circular one as there was less complexity from moving parts.
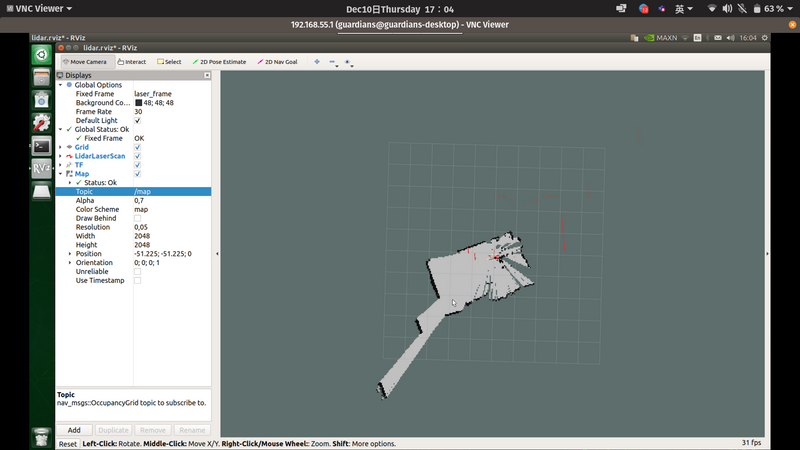
Lidar
One other important component to our design would be the Lidar. Naturally, we would like the Lidar to be unobstructed and the go to position would be at the top of the robot. However, after considerations, it was decided that mounting it at the bottom of the robot would allow for more coverage. As this is a 2D Lidar, having it mounted above might miss out crucial obstacles such as children whom might be shorter than the robot as well as other natural terrain like stairways. This does however mean that the pillars might obstruct the data that is being captured.

Design considerations for the Lidar. Apologies if it is not clear as it was documented on glass.
Wheels
In order for mobility, our robot needs to be equipped with wheels. However, there are many ways in which this could be accomplished. Some of our ideas included various configurations of 2 wheel drive along with omniwheels. We also thought about 4 wheel drives and having a combination of both. Eventually, we kept to the same design as our earlier prototype to have a 2 wheel drive in the middle and 2 wheels on both sides as support.
Material
Last but not least, having talked about the inner mechanisms, we move on to the aesthetics of the robot. With this, we went for acrylic with a matt finishing if possible to give a modern feel.
(Updated: )